Introduction <br> The more active body motion detection methods used by smart toilets are PSD (Position Sensitive Device) and PIR (Passive Infrared Detector). PSD is an active emission, which can detect the position relatively accurately, but is easily affected by the surrounding environment and obstacles, resulting in false detection. PIR usually recognizes the human body by detecting infrared rays radiated from the human body. It is a motion sensor, but also It is susceptible to the surrounding environment such as temperature. At the same time, PSD and PIR detection methods can not pass non-transparent materials, usually need to open a window to detect the received signal, which to some extent undermines the integrity and coordination of the appearance of the product. Contrary to the current simple and stylish style of bathroom.
In order to fully guarantee the appearance integrity of the product and better detection effect, this paper proposes a microwave human body detection method realized by Doppler principle.
1 Overall scheme design <br> This design mainly includes microwave sensor HB100, notch filter, digital gain gain amplifier, shaping circuit and single chip PIC16F1824 in hardware. The design block diagram is shown in Figure 1.
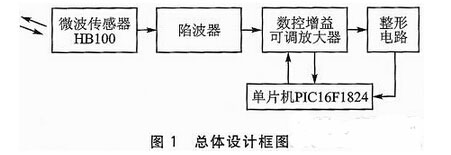
The system works as follows: First, the PIC16F1824 microcontroller controls the microwave sensor HB100 to transmit microwave signals, and continuously detects the received reflected waves, and mixes the transmitted and reflected waves according to the Doppler principle, and then outputs a Doppler with intermediate frequency characteristics. The signal is filtered by a notch filter to remove some of the interference signals from the system, and then input to a digitally controlled gain adjustable amplifier for signal amplification. The output of the digitally controlled gain adjustable amplifier is respectively connected to the single chip microcomputer and the shaping circuit, and the output of the shaping circuit is connected to the single chip microcomputer, and the single chip microcomputer outputs the amplification gain of the numerical control gain adjustable amplifier according to the external sensitivity condition of the system. The signal is processed by the waveform acquisition processing unit, the frequency detection processing unit, the amplitude detection processing unit and the signal processing unit in the single chip controller, and is determined according to the waveform trend of the Doppler signal, combined with the predetermined amplitude and frequency conditions. The behavior of the human body is output and the corresponding control signal is output.
This design makes full use of the intensity variation law of Doppler waveform, adopts the judgment trend of signal intensity, and combines the limitation of intensity and frequency to achieve a good and reliable detection effect.
1.1 Hardware Design 1.1.1 PIC16F1824 microcontroller PIC16F1824 is a low-cost, high-performance 8-bit microcontroller designed by American Microchip. The maximum operating frequency is 32 MHz, with 4 KB of Flash program memory, 256 bytes of data memory and 256 bytes. The byte EEPROM data memory can be used to store some parameter settings in the system, such as the gain setting of the digitally controlled gain adjustable amplifier, and the software sensitivity setting of the system (including sensitivity mode, sensitivity value, sensitivity gear, etc.). The microcontroller also has a wealth of peripheral resources, such as an internal oscillator, 10-bit A/D converter, enhanced serial communication module, comparator, etc., without additional external resources, which enhances the system's compactness and reliability. It also saves the design cost of the system.
In this paper, the 10-bit A/D converter is used to collect the Doppler signal of the system and send it to the processing unit at the back end for analysis and processing. The enhanced serial communication module communicates with the main control system of the smart toilet, receives the relevant sensitivity setting adjustment information of the system, and transmits the human body sensing detection information to the main control system.
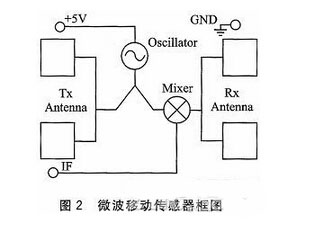
1.1.2 Microwave Sensor The HB100 Microwave Motion Sensor is an X-band mobile sensing Doppler module with low power consumption, high sensitivity and small size. It is an ideal low-cost mobile detector. It consists of a dielectric oscillator (DRO) and a pair of microstrip antennas (including a transmitting antenna and a receiving antenna); it is used to transmit a high-frequency electromagnetic wave of 10.525 GHz to a space, and receive a reflected wave that is folded back after the high-frequency electromagnetic wave encounters an obstacle. After the received wave and the transmitted wave are mixed, a Doppler signal having an intermediate frequency signal characteristic is output. The block diagram of the microwave motion sensor is shown in Figure 2.
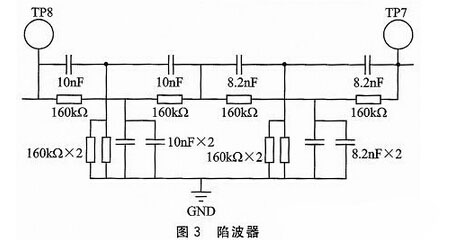
1.1.3 traps Intelligent toilets need to detect the approach and departure of the human body. After analyzing relevant data and test data, it is found that the operating frequency of the human body is concentrated at 30-80 Hz, which is easily interfered by 100 Hz or 120 Hz in the environment and the power grid. , causing false triggering action, so the filter is added to the design to achieve the filtering function, as shown in Figure 3.
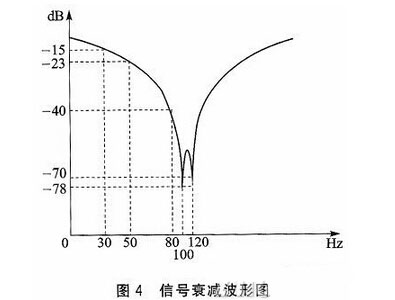
After testing, the attenuation of the trap by frequency is shown in Fig. 4. The notch has an attenuation of more than 70 dB (3 162 times) for the 100 Hz or 120 Hz frequency and only 40 dB (100 times) for the 80 Hz frequency. The attenuation of the human body's frequency of 50 Hz (corresponding to a moving speed of 0.7 m/s) is a linear drop, which is less than 23 dB (14 times) and can be ignored. Therefore, the trap can effectively filter out the interference signal.
1.1.4 Numerically Controlled Gain Amplifier The NC adjustable gain amplifier is used to amplify the weak Doppler signal and is a gain adjustable low frequency amplifier. When an object moves within the area covered by the microwave sensor, the microwave sensor outputs a Doppler signal, and the output intensity is related to the emission intensity of the emitted energy. Generally, the signal is weak, so a high-gain low-frequency amplifier is needed to process This signal allows it to be recognized by the processor, and the digitally controlled gain tunable amplifier does just that. At the same time, the amplifier can be automatically adjusted by the controller depending on the situation. The digitally controlled gain adjustable amplifier includes a fixed gain amplifier and an adjustable gain amplifier. The amplification circuit is shown in Figure 5.
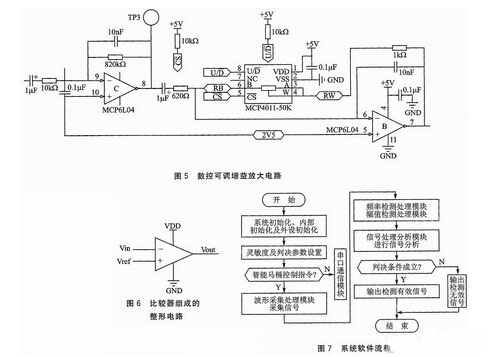
The digitally controlled adjustable gain amplifier achieves 64-level gain adjustment by adjusting the resistance of the digital potentiometer MCP4011-50K. The MCP4011-50K is a low-cost, volatile 50 kΩ digital potentiometer from Microchip, featuring 64 taps and a simple incremental/decremental (U/D) serial interface to control the wiper settings. However, it is a volatile digital potentiometer. After the power is turned off, the wiper setting value is not saved. Therefore, the wiper setting value is saved by the EEPROM inside the PIC16F1824 of the microcontroller, and is restored to the MCP4011-50K chip during power-on initialization.
1.1.5 shaping circuit The function of shaping circuit is to shape the signal with slow or irregular change, and at the same time, the interference signal in the input signal can be eliminated; the single chip uses this to measure the frequency component in the Doppler signal; The internal comparator of the microcontroller is completed. The principle block diagram is shown in Figure 6.
1.2 Software Design The design software mainly includes system initialization module, serial communication module, sensitivity setting processing module, waveform acquisition processing module, frequency detection processing module, amplitude detection processing module and signal processing analysis module. The specific software flow is shown in Figure 7. Show.
2 Principles of human motion detection <br> Microwave sensors continuously emit high-frequency electromagnetic waves into space. When the human body moves within the area covered by the microwave sensor, the high-frequency electromagnetic wave emitted by the microwave sensor is reflected back and reflected by the human body, and is received by the microwave sensor; the microwave sensor mixes the received wave and the transmitted wave to output an intermediate frequency signal, that is, Puller signal.
The Doppler signal first filters the noise in the signal through the notch filter, and then enters the digital gain adjustable amplifier. The signal is amplified and recognized by the single chip microcomputer; the amplified signal is sent directly to the single chip, and the other path passes through the shaping circuit. The irregular signal is shaped and sent to the microcontroller to measure the frequency of the Doppler signal.
After the Doppler signal enters the MCU, the waveform acquisition processing module, the frequency detection processing module and the amplitude detection processing module perform corresponding processing to obtain the amplitude and frequency, and then the signal processing unit utilizes the level change trend and the amplitude frequency. The limit is to make the final judgment. Finally, the MCU performs tasks such as flipping and scouring according to the result of this determination.
When the target object is stationary, the amplitude and frequency of the Doppler signal remain unchanged. When the target object moves to the Doppler microwave sensor, the amplitude of the Doppler signal will show an upward trend, and the frequency will also become larger; when the target object moves away from the Doppler microwave sensor, the Doppler signal The amplitude will show a downward trend, and the frequency will also become smaller. The amplitude of the Doppler signal is related to the specific position of the target object. The Doppler frequency generated by the motion of the target object depends on the target object and the toilet. Relative speed of movement.
3 Analysis of human motion detection process <br> Taking the detection of human body proximity as an example, suppose that the single-chip microcomputer detects that the human body is close to the preset parameter as amplitude V0 and the frequency is [F0, F1], then the preset determination condition is: V>V0, F1>F>F0, the amplitude change trend increases.
The human body moves toward the Doppler microwave sensor, and the Doppler microwave sensor continuously outputs a Doppler signal, which is very weak and is doped with many noises. The Doppler signal first passes through the trap, initially filtering out the noise in the signal, and then amplifying the signal by AC coupling into the low frequency amplifier. The AC coupling method removes the DC component doped in the Doppler signal, making the Doppler signal more pure. The amplified Doppler signal then enters the digitally controlled gain-adjustable amplifier, amplifying the signal to the extent that it can be recognized by the microcontroller. The magnification of the digitally controlled gain adjustable amplifier is determined by the microcontroller according to the operating mode. The Doppler signal output from the digitally controlled gain adjustable amplifier (assuming the amplitude is V and the frequency is F) is sent directly to the microcontroller for processing.
The constant movement of the human body causes V and F to be constantly changing. Through the software algorithm, the MCU recognizes, records and stores the changes of V and F, and continuously compares with the preset judgment conditions. When V>V0, F1>F>F0 is detected, and the amplitude is a rising trend curve, the controller considers it a valid proximity detection to perform the corresponding output. If none of the three conditions meets the requirements, the microcontroller will consider the inactive proximity detection and will not execute the corresponding output.
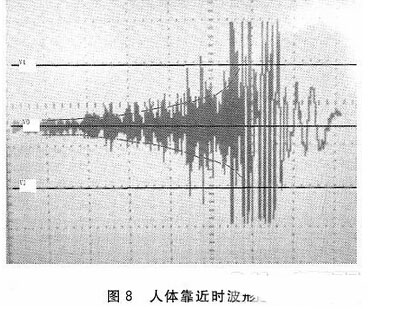
When the human body moves from a distance to the front of the Doppler microwave sensor, the waveform detected by the microwave detecting device is as shown in FIG. It can be seen that the whole curve (level) is in an upward trend, and the trend can be detected by a software algorithm; the V1 limit in the figure is used to specify the effective position of the target object; the waveform tail curve has a downward trend because the target object has Arrive at the location and stop moving. After detecting that the human body is approaching the toilet, the toilet can immediately perform tasks such as automatic flipping.
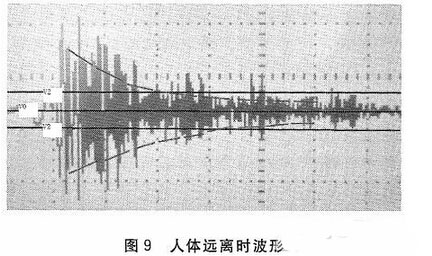
When the human body moves from the front of the Doppler microwave sensor to a distant place, the waveform detected by the microwave detecting device is as shown in FIG. It can be seen that the whole curve (level) shows a downward trend, which can be detected by a software algorithm; the V2 limit in the figure is used to specify the effective position of the target object to leave. After detecting that the human body has been away from the toilet, the toilet can perform tasks such as automatic flushing and automatic closing.
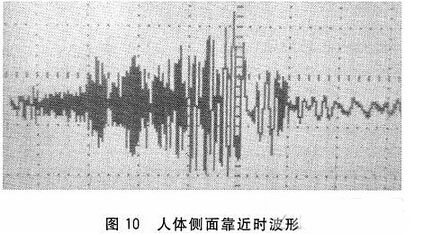
When the human body moves from the side of the Doppler microwave sensor to the front of the sensor, the waveform detected by the microwave detecting device is as shown in FIG. It can be seen that the entire curve (level) is very similar to the curve of Figure 8, and is also in an upward trend.
The MCU samples and inputs the Doppler signal, and detects the amplitude and frequency from it. At the same time, the input Doppler signal is processed to extract the trend of the amplitude change, that is, the rising trend and the falling trend. Based on the detected information, the MCU finally determines whether it is a valid detection according to the preset determination condition, and executes the corresponding output.
There are three conditions for the determination: amplitude, frequency and amplitude change trend. The three conditional MCUs have preset values, and the controller compares the three conditions with the preset values, and if it is satisfied, it is regarded as a successful and effective detection. For example, if the detection target object is close, the amplitude is V0, the frequency is [F0, F1], and the amplitude change is an upward trend. The result detected by the MCU is V, and the frequency is F. If V>V0 and F1>F>F0, and the amplitude change trend is rising, it will be regarded as a valid detection; if any of these three conditions cannot be satisfied, it will be regarded as invalid detection.
Conclusion <br> This paper systematically analyzes the hardware and software design principles from the aspects of system solutions and key modules. It introduces the application of microwave sensor HB100 on smart toilets, mainly for detecting the proximity or departure of human body, and based on the test results. Perform the corresponding flip, cover, flushing and other actions to eliminate the artificial action and achieve the intelligent effect. The program has achieved good application results on actual products.
Stainless Steel Insulated Cup,316L Stainless Steel Cup,Good-Looking Insulated Cup,Small Insulated Cup
JOYOUNG COMPANY LIMITED , https://www.globaljoyoung.com